
Indoor-Ortung mit dem Localino v3.0 Kit
08.12.2020
Einleitung
Eine Datenintegration bietet vielfältige Möglichkeiten zur Optimierung der Verfügbarkeit und Produktivität von Produktionsmaschinen. So kann die Zusammenführung einzelner Sensordaten zur Ableitung und Gewinnung neuer Prozessinformationen beitragen. Bei einer Fräsmaschine kann ein erhöhter Energieverbrauch bei einer bestimmten Produktvariante beispielsweise darauf hindeuten, dass das Werkzeug verschlissen ist (Anderl et al. 2016, S. 132).
Die gesamte Anleitung besteht aus vier Teilen. Dies ist Teil 4 der Anleitung. Teil 1 behandelt die Inbetriebnahme einer CloudRail.Box und Teil 3 die Umsetzung einer Abstandsmessung an einer industriellen CNC Maschine.
1. Einrichtung der Anker
Das Localino v3.0 Starter Kit besteht aus vier Ankern und zwei Ortungs-Tags (Shopseite). Vor Inbetriebnahme ist der Virtual COM Port Driver 1.4 zu installieren (Downloadlink).
Nachdem die Anker mit dem Stromnetz verbunden wurden, suchen diese automatisch nach einem WLAN mit der SSID „localino“. In unserem Anwendungsfall verwenden wir einen Nighthawk M1 LTE-Router (Abbildung 1), von welchem die SSID entsprechend auf „localino“ geändert werden muss.

Abbildung 1: LTE-Router Nighthawk M1
2. Kalibrierung der Anker
Die Software „Localino Frontend“ eignet sich zur Kalibrierung der Anker (Abbildung 2). Schalten sie den Tag an, zeigt die Software die Anker in Form von grünen Quadraten und die Tags mittels roter Punkte an. Ist vorgesehen, zusätzlich die z-Koordinate des Tags zu ermitteln, werden vier Anker benötigt. Hierbei ist einer der vier Anker auf eine andere Höhe anzubringen als die Anderen. Die vier Anker sind räumlich vorzugsweise in Form eines Quadrates anzubringen. Zur Kalibrierung sind die räumlichen Abstände der Anker zu ermitteln und diese als x,y und z-Koordinaten einzugeben. Dies erfolgt durch Auswahl des Buttons „Edit“ neben dem gewählten Anker. Hierdurch wird automatisch die Konfigurationsdatei entsprechend der eingegebenen Koordinaten geändert.

Abbildung 2: Localino Frontend Software
Alternativ können die Koordinaten direkt in der Konfig-Datei angepasst werden (Abbildung 3).

Abbildung 3: Ausschnitt aus der Konfig-Datei zur Eingabe der Anker-Koordinaten
2. Ändern der IP-Adresse der Anker
Da der LTE-Router aufgrund der Anforderungen anderer Sensoren in unserem Anwendungsfall auf eine andere Subnetzadresse geändert wurde, ist die IP der Anker entsprechend zu konfigurieren. Hierzu werden die Anker an einem Y-USB-Kabel (Abbildung 4) angeschlossen und der rote Anschluss des Kabels mit einem Rechner verbunden. Daraufhin ist der Konfigurations-Button des Ankers mit einem spitzen Gegenstand zu betätigen. Nun kann der schwarze Anschluss des Kabels mit einem Rechner verbunden und die Software „Localino Configurator“ (Abbildung 5)gestartet werden.

Abbildung 4: Y-USB-Kabel
Nachdem die Buttons „Connect“ und „Read“ betätigt wurden, werden die aktuellen Informationen des angeschlossenen Ankers angezeigt. In unserem Fall wird die IP-Adresse von 192.168.255.45 auf 192.168.1.45 geändert und anschließend mit dem Button „Set“ bestätigt. Bei der Konfiguration ist zu beachten, dass sich die IP-Adresse des Ankers auf die Datensenke bezieht, also „wohin“ die Daten gesendet werden. Dementsprechend müssen die IP-Adressen von allen Ankern einzeln auf diese Weise geändert werden.
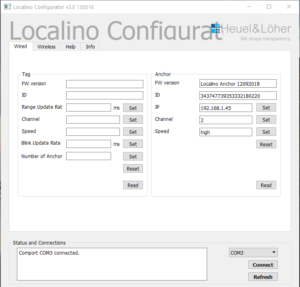
Abbildung 5: Localino Configurator Software
In der Konfigurationsdatei „config“ sind ebenfalls Änderungen vorzunehmen:
- „listen_adress“: Die „listen_adress“ ist auf die Adresse des Rechners bzw. des MQTT-Servers zu ändern, auf welchem die Daten empfangen werden sollen.
- „publisher-udp“: Die „publisher-udp“ ist auf die zuvor eingestellte Datensenke der Anker zu ändern.
- „prefilter-basic“: Wird der Wert „prefilter-basic“ auf 19.35 gesetzt, erhöht sich die Genauigkeit bei mehr als zwei gleichzeitig eingesetzten Tags. Wird der Wert hingegen auf 19.70 eingestellt, erhöht sich die Ortungszuverlässigkeit und -Genauigkeit bei weniger als drei Tags.
- „min_anchors“: Werden lediglich drei Anker verwendet, ist der Eintrag „min_anchors“ auf „3“ zu setzen.
Starten Sie die Software „Localino Backend“. Wurden die Anker ordnungsgemäß konfiguriert, melden diese in einem Abstand von ca. 5 Sekunden deren aktuelle Voltzahl an das Backend. Schalten sie nun auch den Tag an, meldet dieser seine aktuelle Position in Form von x, y und z-Koordinaten zurück. Bevor sinnvolle Daten generiert werden können, müssen die Anker vorerst kalibriert werden.
Troubleshooting: Finden die Anker innerhalb von sechs Minuten kein Netzwerk mit der SSID „localino“, eröffnen sie automatisch ein eigenes Netzwerk namens „0_localino“. Verbindet man sich mit diesem Netzwerk und gibt in der Adresszeile eines Internetbrowsers die IP „192.168.4.1“ ein, können Eigenschaften des jeweiligen Ankers angezeigt werden.
2. Praxisanwendung an einer CNC-Maschine
Mittels eines Sensorsystems soll Rüstfortschritt einer CNC-Maschine eines unterfränkischen Komponentenherstellers automatisch erkannt werden. Für das Anlernen des Machine-Learning Algorithmus werden versuchsweise die Laufwege des Maschinenbedieners aufgenommen.

Befestigung eines Ankers an einem Gestell der Kühlmittelpumpe

Befestigung eines Ankers an einem Werkzeugregal

Befestigung eines Ankers an einer Werkzeugbank

Befestigung eines Ankers an der Blechabschirmung eines Arbeitsbereiches

Localino Tag zur Ortung
Mithilfe von MatLab erfolgt sodann die Auswertung hinsichtlich des Rüstfortschrittes einer CNC-Maschine.
3. Weiterführende Tutorials
Tutorial: Auswertung vorhandener Sensordaten mit MatLab
Quellen:
Anderl, Reiner; Anokhin Oleg; Arndt, Alexander (2016): Effiziente Fabrik 4.0 Darmstadt. Industrie 4.0 Implementierung für die mittelständige Industrie. In: Sendler, Ulrich (Hg.): Industrie 4.0 grenzenlos. Berlin, Heidelberg: Springer, S. 121–136.
S. Schmitt
- Studentischer Mitarbeiter im Forschungsprojekt OBerA an der FHWS
- Student im Masterstudiengang Wirtschaftsingenieurwesen

